Bedien- und Auswertesoftware für die Kanalinspektion
Im Rahmen der Entwicklung der Inspektionssysteme für den Abwasserkanal Emscher wurden vom Geschäftsfeld Robotersysteme alle Systemkomponenten für die Datenverarbeitung entwickelt.

Inspektions- und Reinigungsroboter für Abwasserkanäle: Datenverarbeitung
Softwarearchitektur
Bedingt durch die in der Servicerobotik einzigartigen Herausforderungen an die Software wurde eine neuartige, serviceorientierte Softwarearchitektur entwickelt, die Elemente aus gängigen Client-/Server- und Publish-/Subscribe-Ansätzen kombiniert. Diese ermöglicht eine effiziente, zuverlässige und vollständige Erfassung, Fusion, Analyse, Archivierung und Visualisierung von Sensordaten und Verarbeitungsergebnissen. Im Resultat liegt ein modernes Framework für Inspektionsroboter vor, das selbstverständlich auch für viele andere Serviceroboter adaptiert werden kann.
Bedien- und Auswertesoftware
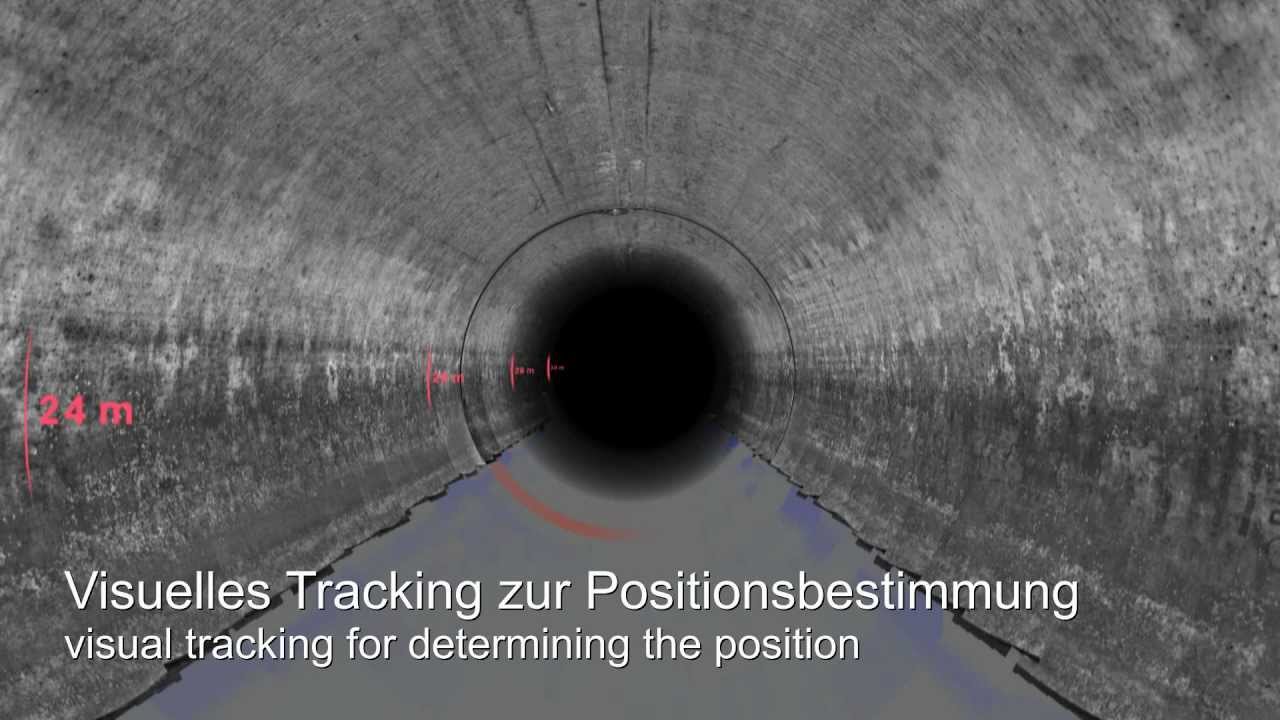
Die Inspektionssysteme für Abwasserkanäle erzeugen bei Ihrem Einsatz umfangreiche und teilweise abstrakte Daten. Um diese sehr großen Datenmengen zu bewältigen, wurde ein Softwarepaket, die sogenannte Bedien- und Auswertesoftware (kurz BASW), entwickelt. Die BASW bietet dem Benutzer weltweit erstmalig eine übersichtliche 3D-Darstellung des inspizierten Kanals. Sie ermöglicht eine »virtuelle Begehung« am Schreibtisch. Dabei sind Detailansichten und spezielle Hilfsmittel zur genauen Evaluierung, Quantifizierung und Messung möglicher Schäden enthalten. Die BASW wurde so konzipiert, dass es sowohl als Werkzeug zur nachträglichen Sichtung und Analyse von gespeicherten Datensätzen als auch als Teleoperationsumgebung während der Inspektion eingesetzt werden kann.