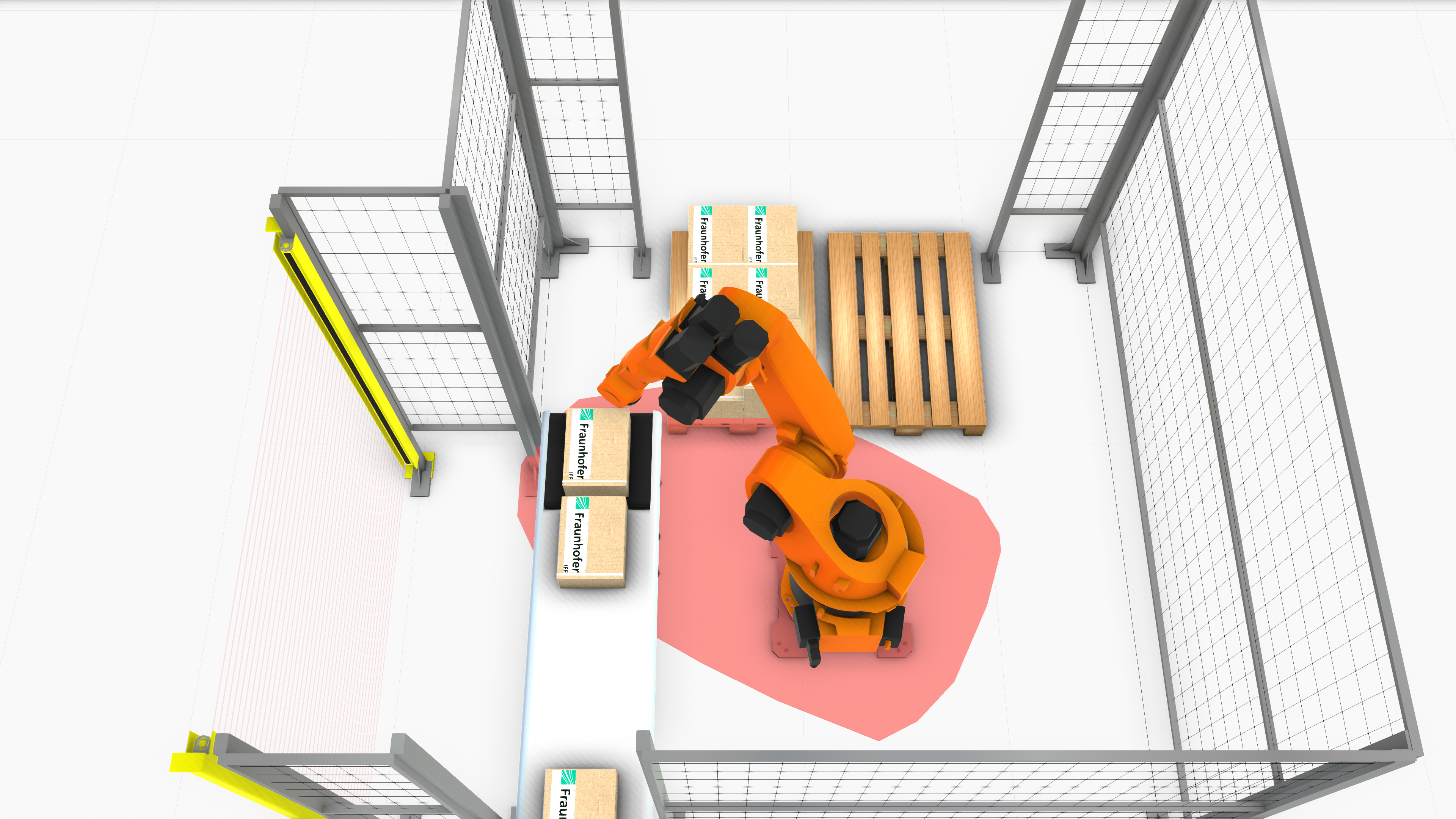
Geschwindigkeits- und Abstandüberwachung gestattet die sichere Kooperation mit Schwerlastrobotern. Die hierfür notwendigen Sicherheitsabstände bekommen Sie von uns.
Wenn es um die ergonomische Unterstützung beim Handhaben hoher Lasten geht, sind Schwerlastroboter erste Wahl. Eine Mensch-Roboter-Kollaboration mit großen und leistungsfähigen Robotern klappt aber nur, wenn Sie Kollisionen mit Menschen sicher vermeiden können. Die Sicherheitsbetriebsart „Speed and Separation Monitoring“ (SSM; „Geschwindigkeits- und Abstandsüberwachung“) nach DIN EN 10218-2 und ISO/TS 15066 legt für die Kollisionsvermeidung einen Mindestabstand zum Menschen fest, den der Roboter zu keinem Zeitpunkt unterschreiten darf.
In die Berechnung des Mindestabstands fließen zahlreiche Parameter des Roboters (z. B. Bremswege), der Sicherheitssensoren (z. B. Auflösung) und des Menschen (z. B. Annäherungsgeschwindigkeit) ein. Er muss für das gesamte Hüllvolumen des Roboters und alle Bewegungsabläufe berechnet werden. Ohne eine genaue Kenntnis des vollständigen Mindestabstands zu allen Roboterbewegungen besteht die Gefahr, dass die sicherheitstechnische Auslegung des Robotersystems den normativen Anforderungen nicht genügt. Es kann z. B. sein, dass der gewählte Sicherheitssensor nicht in der Lage ist, den erforderlichen Mindestabstand zwischen Mensch und Roboter jederzeit zu überwachen.