Sichere Personenlokalisierung
Durch die Integration taktiler Sensorsysteme in Fußbodenbeläge können auf den Boden einwirkende Kräfte ortsaufgelöst erfasst werden. Derart ausgestattete Fußbodenbelag erkennen sowohl ortsfeste als auch ortsveränderliche Objekte und können zur Absicherung von Maschinen und Anlagen, aber auch zur Verfolgung von Waren und Personenströmen oder zur Personenzählung genutzt werden. Im Medizin- und Rehabereich können drucksensitive Fußbodenbeläge darüber hinaus zur Sturzerkennung oder Ganganalyse eingesetzt werden.
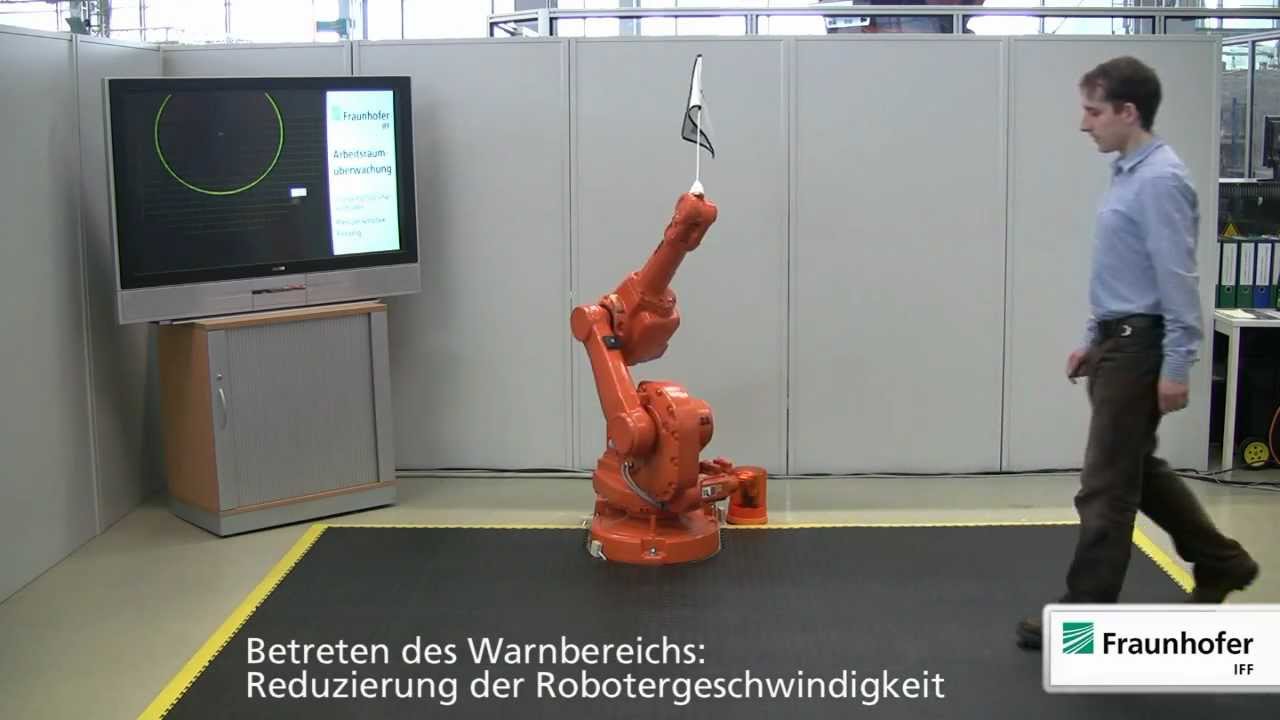
Im Rahmen des Projektes wurde der Arbeitsbereich eines ABB IRB1600 Industrieroboters vollständig mit einem drucksensitiven Fußbodenbelag abgesichert. Die taktile Sensortechnologie des Fraunhofer IFF wurde dazu vollflächig in einen Standard-Industriebodenbelag integriert. Der drucksensitive Fußbodenbelag wurde so konfiguriert, dass Personen in der Umgebung des Roboters sicher erkannt und lokalisiert werden können. Die ortsaufgelöste Positionserfassung ermöglicht darüber hinaus die freie Definition individueller Warn- und Schutzbereiche. Verletzungen der Schutzbereiche werden sicher erkannt und die Bewegung des Roboters verlangsamt bzw. stillgesetzt.
Im Ergebnis des Projektes konnte nachgewiesen werden, dass drucksensitive Fußbodenbeläge klassische Schutzeinrichtungen (Schutzzäune) ersetzen können. Ihre Stärken spielen die drucksensitiven Fußbodenbeläge dabei insbesondere in stark verschmutzten Umgebungen aus, in denen z.B. optische Sensorsysteme auf Grund der Staubbelastung nicht eingesetzt werden können.
Menschen und Roboter können enger zusammen arbeiten und die Einricht- und Umrüstzeiten von Produktionsarbeitsplätzen werden drastisch reduziert.