Unsere Projekte und Studien liefern neue Grenzwerte für die sichere Mensch-Roboter-Kollaboration von morgen
Für kollaborative Robotersysteme, die Hand in Hand mit Menschen zusammenarbeiten, legt ISO/TS 15066 für die Sicherheitsbetriebsart "Leistungs- und Kraftbegrenzung" eine Reihe von biomechanischen Grenzwerten fest. Diese Grenzwerte darf der Roboter im Falle einer Kollision mit dem Menschen (Stoß oder Klemmung) nicht überschreiten. Ein Großteil der Grenzwerte aus ISO/TS 15066 sind bislang nicht experimentell bestätigt. Sie gelten daher nur unter Vorbehalt und sollen gegen neue und valide Grenzwerte ausgetauscht werden, sobald diese zur Verfügung stehen.
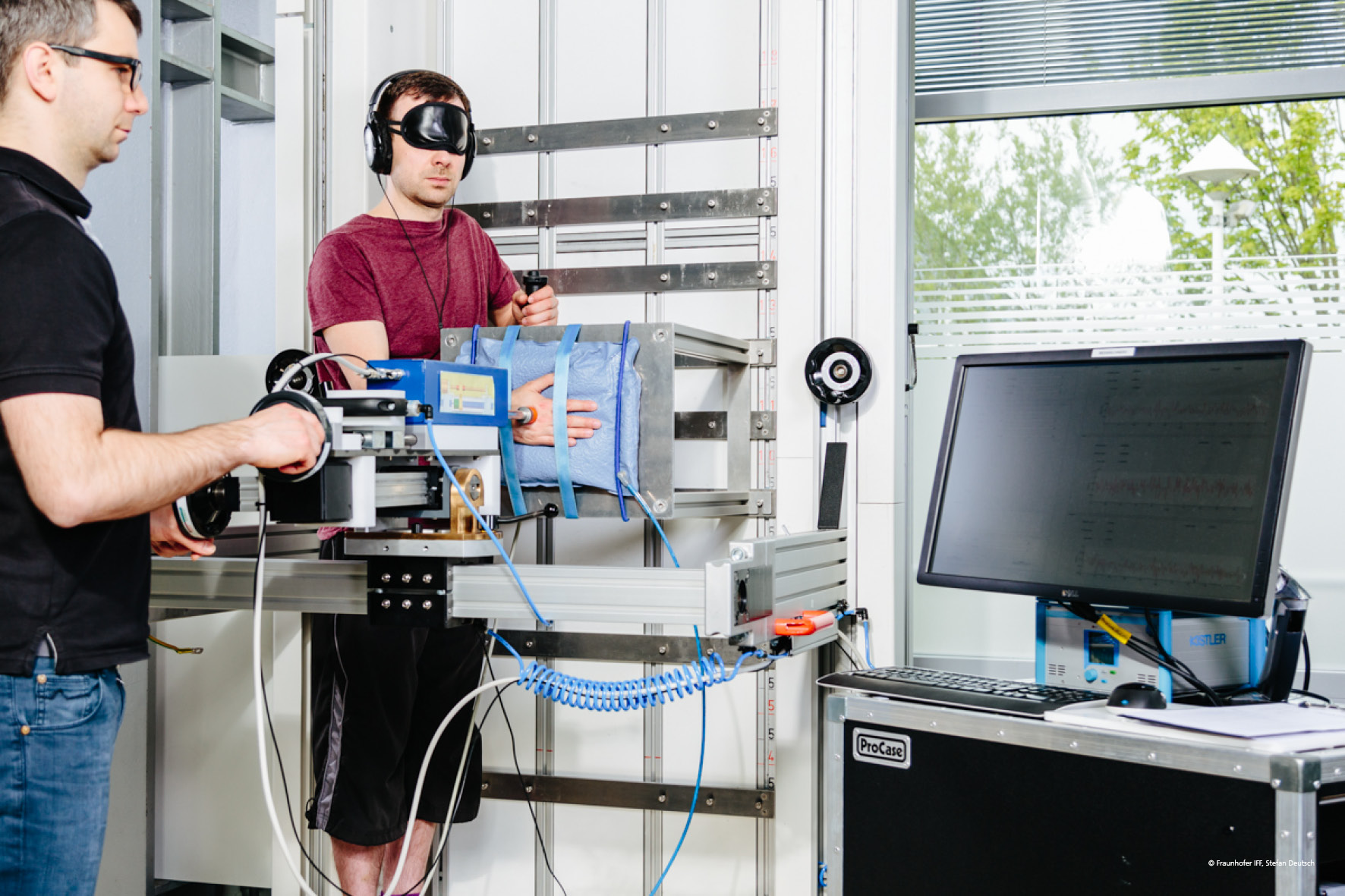
Seit 2012 führen wir weltweit einmalige Probandenstudien durch, aus denen neue Grenzwerte und weitere biomechanische Kenndaten für eine sichere MRK hervorgehen. Mithilfe systematisch eingestellter Stoß- und Klemmbelastungen wurden verschiedene Beanspruchungsschwellen untersucht, die vom Schmerz- bis zum Verletzungseintritt reichten. Während der Studien hat die Ethikkommission und Klinik für Unfallchirurgie der Otto-von-Guericke-Universität das Fraunhofer IFF unterstützt und begleitet.