Unter dem klassischen Bin-Picking versteht man die zumeist robotergestützte Entnahme unsortierter Teile aus einer Kiste. Hierzu müssen die Objekte zuvor erkannt und ihre Lage im Behälter bestimmt werden. Häufig werden kamerabasierte Erkennungssysteme verwendet, da sie ein hohes Maß an Flexibilität und Zuverlässigkeit bieten. Nach erfolgreicher Objekterkennung wird so aus allen möglichen Greifkonfigurationen die vielversprechendste Variante ausgeführt.
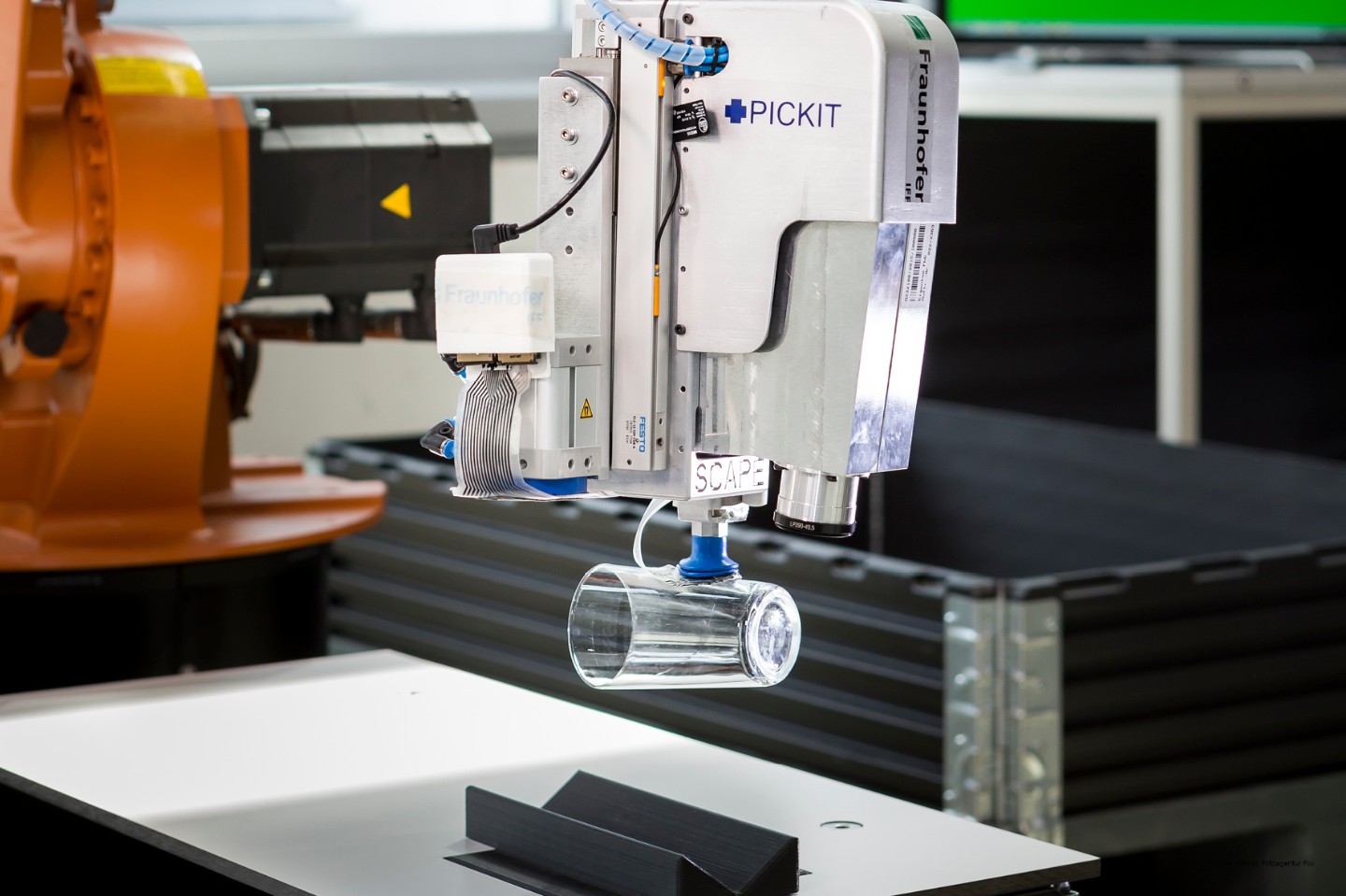
Das pickit-Experiment wird im Rahmen des EU-Forschungsprojektes Echord++ durchgeführt. Das Projekt stellt einen neuartigen Ansatz zur Verbesserung herkömmlicher Bin-Picking-Systeme dar, indem der standardisierte »Griff in die Kiste« um die Modalität des taktilen Greifens erweitert wird. In enger Kooperation mit Scape Technologies, dem Marktführer auf dem Gebiet standardisierter Bin-Picking-Systeme, wurden innovative Lösungskonzepte wie die taktilbasierte Objekterkennung im Greifer erarbeitet und getestet.
Im Fokus des Projekts steht eine Verbesserung herkömmlicher robotergestützter Handhabungsvorgänge. Greifvorgänge können in bestimmten Situationen z.B. aufgrund unzureichender Objektdaten nicht zuverlässig durchgeführt werden oder müssen sogar bereits vorab ausgeschlossen werden. Infolgedessen werden die Behälter nicht vollständig entleert und die Taktzeit der Systeme verschlechtert sich. Ziel des pickit-Projekts ist es deshalb, über das taktile Druckprofil beim Greifen zusätzliche Objektinformationen zu ermitteln und diese Information in den Handhabungsprozess zurückzuführen. So kann beispielsweise ein Verrutschen des Objektes im Greifer einfach korrigiert werden.