Projektschwerpunkt
Greifsysteme in der Blechbearbeitung sind üblicherweise bauteilspezifische Sonderkonstruktionen, die aufwendig entwickelt wurden und für jedes individuelle Bauteil separat vorliegen müssen. Sie werden aus zahlreichen Profilelementen zusammengesetzt oder bestehen aus einer speziellen Schweißrahmenkonstruktion an denen mehrere Vakuumsauger oder Backengreifer angebracht werden. Jede kleinste Änderung im Bauteil, z.B. durch unterschiedliche Typen im Karosseriebau, bedeutet oft einer Überarbeitung des gesamten Greifsystems.
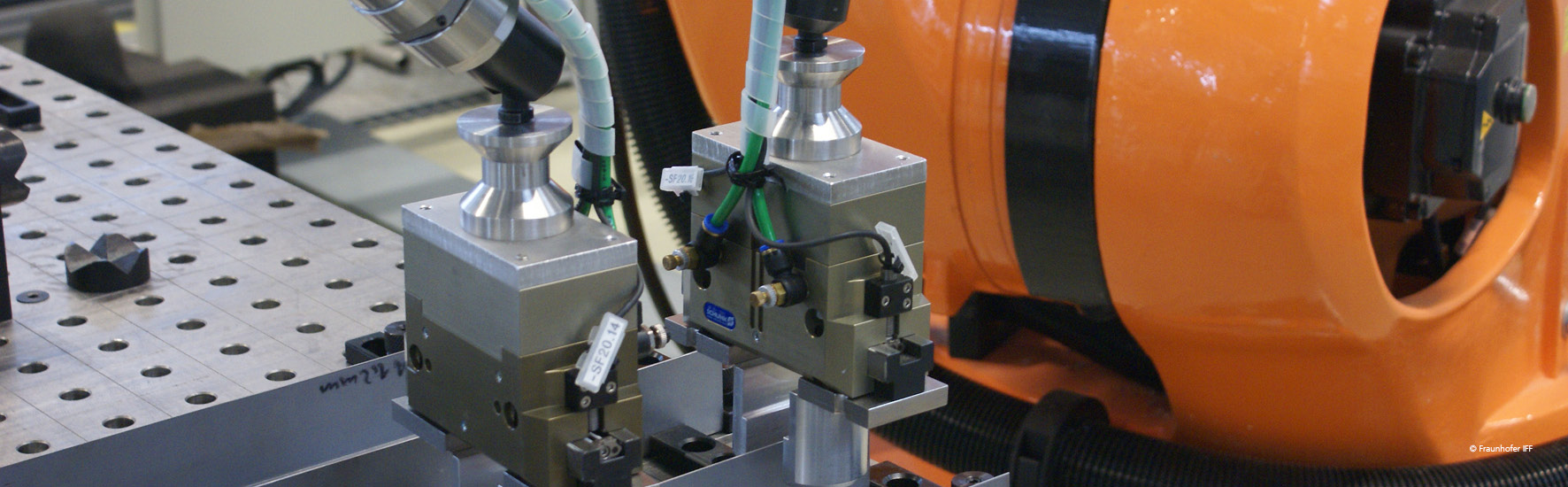
Im Projekt koLas wurde vom Fraunhofer IFF ein flexibler Greifarm für Roboter entwickelt, der die vielen unterschiedlichen Greifsysteme in flexiblen Fertigungs- und Montageprozessen ersetzen kann. Der Greifarm ist aus modularen Elementen aufgebaut, die über feststellbare Dreh-, Schub- und Kugelgelenke beliebig miteinander kombiniert werden können. Die Umkonfiguration des Greifarms auf ein anderes Bauteil erfolgt dabei mit dem Roboter und einer speziell entwickelten Bahnplanungssoftware. Dazu löst der Roboter die Klemmung der Gelenke und fährt auf einer automatisch berechneten Bahn den Greifarm in eine neue Konfiguration. Das freie Ende des Greifarms ist währenddessen an einem ortfesten Punkt fixiert. Der flexible Greifarm ermöglicht somit ein schnelles Umstellen auf ändernde Bauteilgeometrien ohne manuellen Umrüstaufwand.
Die hohe Adaptivität des Greifarms lässt sich nicht nur in Laserbearbeitungsprozessen der Blechbearbeitung einsetzen, sondern kann ebenfalls die Flexibilität zahlreicher Montageaufgaben erhöhen.
Das Verbundprojekt koLas wurde im Rahmen des Programms InnoNet des BMWi unter der Nummer IN-5529 gefördert und vom Projektträger VDI/VDE-IT Berlin betreut. Das Projekt wurde vom Fraunhofer IFF koordiniert.