Im Forschungscampus STIMULATE erforschen und entwickeln interdisziplinäre Teams bildgeführte minimal-invasive Diagnose- und Therapiemethoden in gesellschaftlich höchst relevanten Krankheitsbildern. Das Fraunhofer IFF leitet innerhalb des Forschungscampus die Forschungsgruppe Robotik, die sich mit applikationsübergreifenden Fragestellungen zum Einsatz von Robotern und verwandten Technologien für konkrete Anwendungen in der Medizin beschäftigt. Zu den Anwendungsszenarien zählt insbesondere die exakte Elektrodenplatzierung für die Radiofrequenzablation von Wirbelsäulentumoren.
Forschungscampus STIMULATE
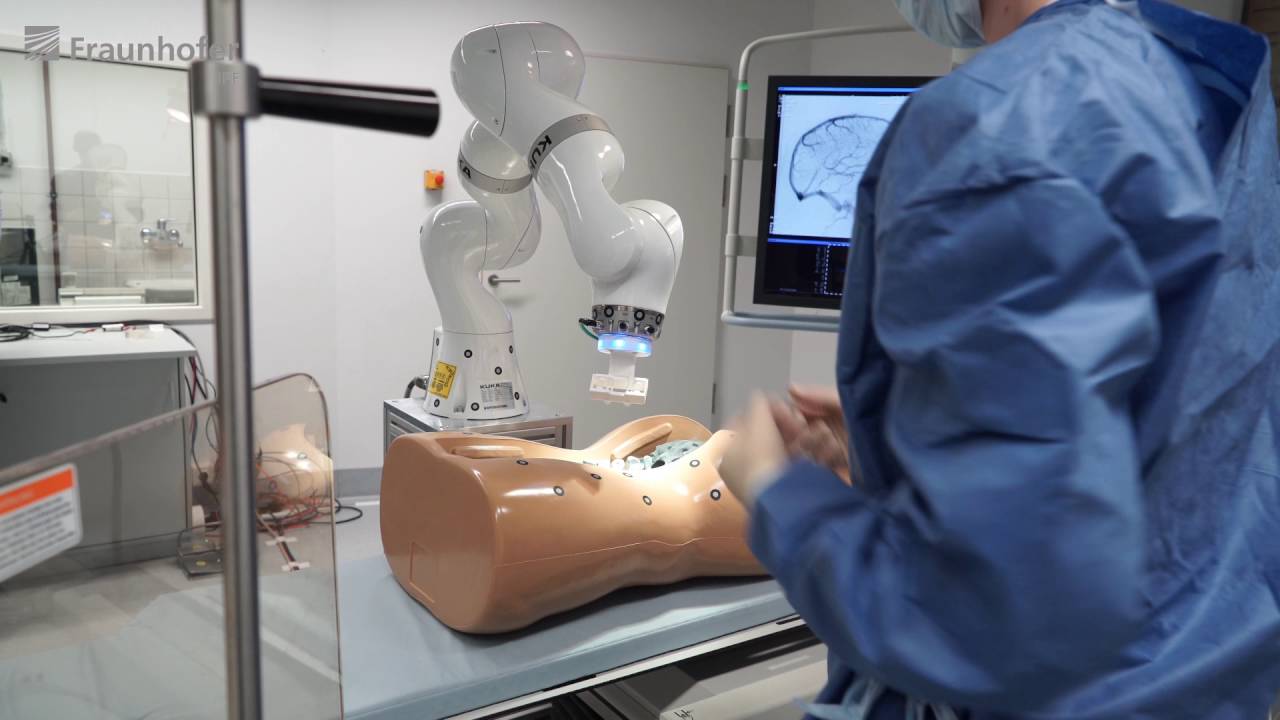
Assistenzrobotik für die minimalinvasive Chirurgie
Metastasierende Tumore sind die häufigste bösartige Erkrankung des Skelettsystems. Die Linderung der Schmerzen und die Prävention von Komplikationen, wie pathologische Frakturen, sind wichtige Teile der Behandlung des Patienten. Hierfür ist die bildgeführte minimalinvasive Radiofrequenzablation ein etabliertes Behandlungsverfahren. Für Patienten mit Wirbelsäulentumoren dient sie zur Stabilisierung der Wirbel und Vermeidung von neurologischen Störungen.
Trotz guten Erfolgschancen dieser Behandlung steht der Chirurg während der Intervention unter einer hohen körperlichen Belastung. Um die notwendige Genauigkeit bei der Platzierung der Elektroden zu erreichen, muss der Chirurg häufig schwierige, nicht ergonomische Körperhaltungen einnehmen. Des Weiteren steht der Chirurg während der Intervention unter einer erhöhten Strahlenbelastung durch das Bildgebungssystem. Durch den Einsatz eines Roboters soll die Strahlenbelastung für den Chirurgen reduziert und die Ergonomie und Genauigkeit bei der Elektrodenplatzierung verbessert werden.
Aus diesem Grund wird im Rahmen des STIMULATE Projektes ein Assistenzsystem auf Basis eines Leichtbauroboters in enger Kooperation zwischen dem Fraunhofer IFF, der Otto-von-Guericke Universität Magdeburg sowie den Industriepartnern KUKA und Siemens entwickelt. Dieses System soll den Chirurgen durch geführte Bewegungen bei der Elektrodenplatzierung unterstützen. Dabei werden verschiedene am Fraunhofer IFF entwickelte Technologien kombiniert, um eine sichere Mensch-Roboter Kooperation zu gewährleisten. Des Weiteren werden Grundlagenuntersuchungen zu Fragestellungen der operationsprozessoptimierten Bewegungsplanung sowie von regelungstechnischen Aspekten des Eingriffs durchgeführt. Eine Besonderheit des Projektes ergibt sich durch die räumliche Nähe zum Forschungscampus, wodurch sich die einmalige Gelegenheit bietet, das System während der gesamten Projektlaufzeit in einer OP-nahen Umgebung zu entwickeln und zu evaluieren.
Datenschutz und Datenverarbeitung
Wir setzen zum Einbinden von Videos den Anbieter YouTube ein. Wie die meisten Websites verwendet YouTube Cookies, um Informationen über die Besucher ihrer Internetseite zu sammeln. Wenn Sie das Video starten, könnte dies Datenverarbeitungsvorgänge auslösen. Darauf haben wir keinen Einfluss. Weitere Informationen über Datenschutz bei YouTube finden Sie in deren Datenschutzerklärung unter: https://policies.google.com/privacyBrain-Maschine-Interface
Assistenzroboter können es motorisch eingeschränkten Menschen ermöglichen, besser mit der Umwelt zu agieren. Auf diese Weise können jene Menschen einen Teil der Fähigkeiten, die sie verloren haben, zurückgewinnen, wodurch eine deutliche Steigerung der Lebensqualität erreicht werden kann. Je nach Schwere der Lähmung einer Person, wird die Interaktion mit dem Roboter jedoch erschwert und konventionelle Bedienmethoden können nicht genutzt werden. Aus diesem Grund wird im Rahmen des Forschungscampus Stimulate die Anwendung von Gehirn-Maschine-Schnittstellen (BMI) für die Steuerung eines Roboters in einer Kooperation zwischen dem Fraunhofer IFF, der Otto-von-Guericke Universität und dem Leibniz-Institut für Neurobiologie untersucht.
In den vergangenen Jahren wurden bemerkenswerte Fortschritte bei der Steuerung von mechatronischen Prothesen mit invasiven Elektronen, die in das Gehirn implantiert wurden, erzielt. Diese invasiven Technologien bergen jedoch hohe Risiken aufgrund der notwendigen Operation und möglichen Entzündungen, wodurch sie für die meisten Betroffenen keine Option darstellen. Insbesondere bei temporären Lähmungen überwiegt das Risiko den Nutzen. Nicht-invasive Technologien haben den offensichtlichen Vorteil, dass sie wesentlich leichter und nahezu risikofrei zu handhaben sind. Bei nicht-invasiven Techniken zur Aufzeichnung von Gehirnsignalen, wie der Elektroenzephalographie (EEG), ist jedoch sowohl das Signal-Rausch-Verhältnis, als auch die Anzahl unterscheidbarer Zustände gering. Dadurch wird die direkte Steuerung der einzelnen Glieder des Roboters unmöglich. Um diese Nachteile gegenüber des invasiven BMI zu kompensieren, muss der Assistenzroboter mit intelligenten Fähigkeiten ausgestattet werden.
Im Rahmen des Projektes wird dazu ein System entwickelt, das es dem Bediener ermöglichen soll, mit Hilfe eines nicht-invasiven BMI auf Basis von EEG Messungen einen Assistenzroboter zu bedienen, um verschiedene Handhabungsaufgaben zu erfüllen. Dazu werden für den Roboter die notwendigen autonomen Fertigkeiten entwickelt und verschiedene Interaktionstechniken untersucht, die eine intuitive Bedienung ermöglichen und die kognitive Last möglichst gering halten. Die Mensch-Roboter-Sicherheit spielt während der gesamten Entwicklung eine zentrale Rolle und wird fortlaufend beurteilt und gewährleistet. Das fertige System wird in einer Probandenstudie umfassend evaluiert und die Ergebnisse werden veröffentlicht.
Forschungscampus - öffentlich-private Partnerschaft für Innovationen
