Im Gegensatz zur Integration von kleinen und mittelgroßen Industrierobotern in MRK-Arbeitsplätze, bedingen Großraum- bzw. Schwerlastroboter den Ausschluss von Kollisionen zwischen Mensch und Roboter und stellen aufgrund des hohen Gefahrenpotentials (hohe Geschwindigkeit, hohe Traglasten) und großflächigen Überwachungsbereiches vielfältige Anforderungen an die sensorische Absicherung.
In diesem Vorhaben wurde ein neuartiges, aktives Sensorsystem zur Arbeitsraumüberwachung für den Anwendungsbereich der Großraum- und Schwerlastrobotik konzipiert und umgesetzt. Dazu wurde eine kollimierte Beleuchtungseinheit entwickelt, die es ermöglicht, ein am IFF entstandenes Überwachungssystem für die notwendige Abdeckung auch großer Arbeitsräume kostengünstig anwendbar zu machen. Das Gesamtsystem setzt dabei auf ein im Bereich der Sicherheitstechnik etabliertes Funktionsprinzip (Ruhestromprinzip). Es wird die aus Sicht vieler Anwender vorteilhafte MRK-Methode „Geschwindigkeits- und Abstandsüberwachung“ umgesetzt, welche Berührungen von Personen mit sich bewegenden Maschinenteilen bzw. Robotern verhindert und daraus resultierende Verletzungen ausschließt. [LINK auf PARU Technologie-Seite]
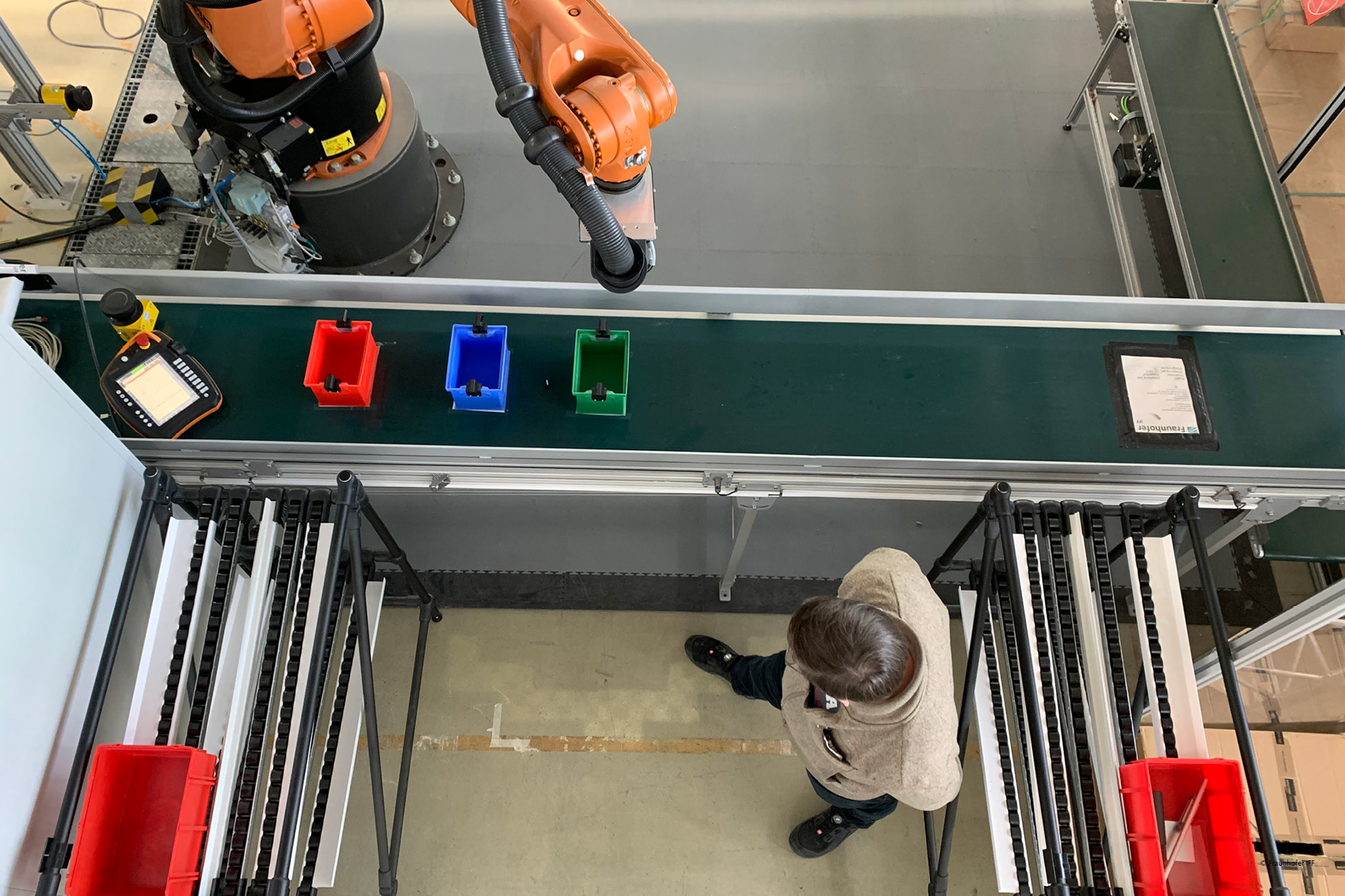
Im Ergebnis wurde in diesem Vorhaben ein realitätsnaher MRK-Demonstrator umgesetzt, welcher eine industrielle Applikation mit Großraumroboter abbildet. Der Zutritt des Werkers in den Arbeitsbereich des Roboters wurde ohne trennende Schutzeinrichtungen mit Hilfe des neu entwickelten Sensorsystems sicherheitstechnisch überwacht. Die einzuhaltenden Sicherheitsabstände zwischen Mensch und Roboter wurden gemäß der Abstandsformel aus der Norm ISO/TS 15066 bestimmt. Dies resultiert darin, dass zu jedem Zeitpunkt ausschließlich die unmittelbaren Gefahrenbereiche für den Menschen nicht zugänglich sind und ein Großteil des Arbeitsraumes für den Menschen zur freien Verfügung stehen. Ein insgesamt geringer und optimierter Platzbedarf sind die Folge.