Flexible und menschzentrierte Arbeits- und Produktionsumgebungen bedingen die Aufhebung einer strikten Trennung (z.B. durch Schutzzäune) von Mensch und Roboter. Die schutzzaunlose Kooperation und Kollaboration erlaubt die Zusammenführung der Stärken von Menschen wie Flexibilität, kognitive Fähigkeiten und Erfahrungswissen, sensomotorische Fähigkeiten mit den Vorteilen von Robotern wie 24/7-Einsatz, hohe Präzision und hohe Traglasten. Diese Art der Zusammenarbeit von Mensch und Roboter in einem gemeinsam genutzten Arbeitsraum erfordert dabei die permanente Gewährleistung der Personensicherheit.
Technologien für sichere Roboterapplikationen
Das Fraunhofer IFF erforscht und entwickelt Technologien zur normenkonformen Detektion gefahrbringender Situationen (z.B. Annäherung oder Kollisionen) zwischen Mensch und Roboter. Die Einhaltung eines separierenden Abstandes gemäß der Betriebsart „Geschwindigkeits- und Abstandsüberwachung“ muss nach ISO/TS 15066 überwacht werden. Diese Kollaborationsart bietet den Vorteil, dass neben kleinen und mittelgroßen Robotern insbesondere auch Großraum- bzw. Schwerlastroboter an der Seite des Menschen sicher eingesetzt werden können. Die dynamische Anpassung der erforderlichen Sicherheitsabstände in Abhängigkeit der aktuellen Roboterkonfiguration (u.a. Gelenkstellungen und –geschwindigkeiten) minimiert den notwendigen Platzbedarf des Roboters und erlaubt die Nutzung eines maximalen Arbeitsbereiches für den Menschen.
Hierzu haben wir ein Verfahren entwickelt, welches die erforderlichen Sicherheitsabstände nach ISO/TS 15066 zwischen Mensch und Robotersystem (Roboter, Werkzeuge, Werkstücke, etc.) zu jedem Zeitpunkt in Echtzeit bestimmt. Dieses Verfahren verwendet die aktuellen Gelenkstellungen und -geschwindigkeiten sowie die aktuelle Traglast des Roboters und berücksichtigt für die Bestimmung der Sicherheitsabstände die roboterspezifischen Eigenschaften hinsichtlich Bremswegen und Anhaltezeiten. Dies resultiert in minimalen und dynamischen Sicherheitsabständen.
Die Überwachung dieser einzuhaltenden Sicherheitsabstände benötigt entsprechende leistungsfähige Technologien. Das Fraunhofer IFF forscht hierzu an unterschiedlichen Konzepten, Verfahren und Sensorsystemen, die jeweils ihre Stärken und Vorteile in verschiedenen Applikationen bzw. Rahmenbedingungen aufweisen. Hierzu zählen neben anderen:
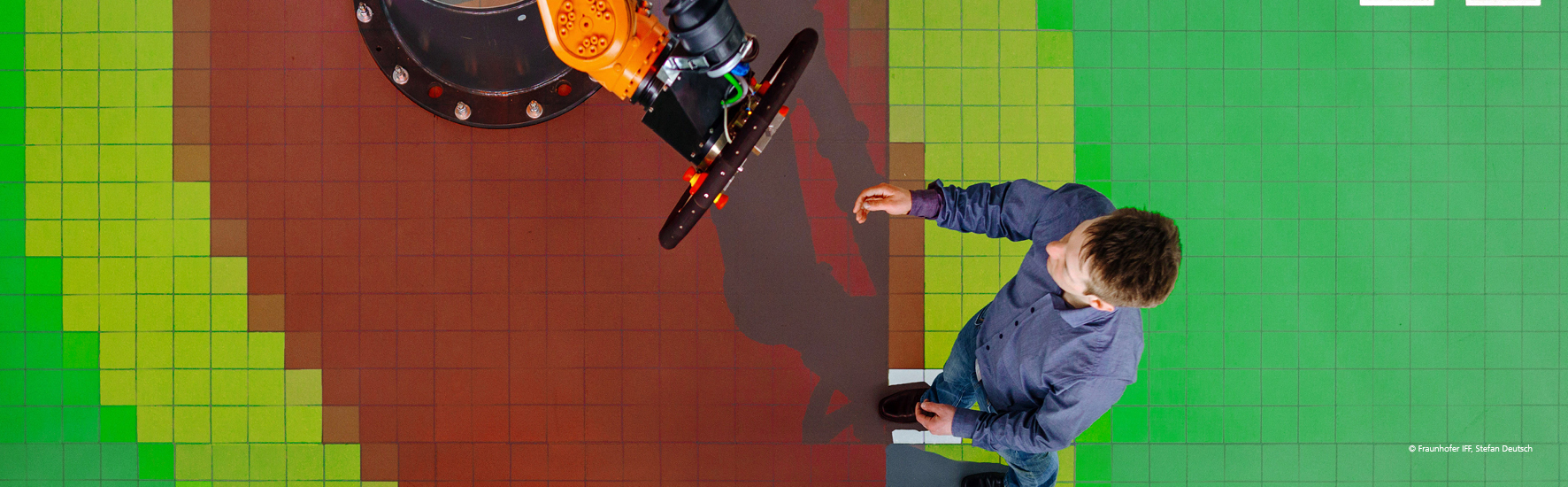
- Optische Sensorsysteme wie projektions- und kamerabasierte Systeme und rein kamerabasierte Systeme (Flächen,- Tiefenbildkameras)
- Berührungsempfindliche Sensoren als (großflächig) taktile Fußböden mit Ortsauflösung
- Annäherungsdetektion durch kapazitive Sensorik direkt am Roboter
- KI-Verfahren zur Analyse von MRK-Arbeitsräumen inklusive der Detektion von Personen und deren Handlungen
- Projektive Visualisierungssysteme zur Sichtbarmachung von aktiven/inaktiven Warn- und Schutzbereichen sowie zusätzlicher Informationen (Roboterzustände, Prozess, usw.)
Darüber hinaus entwickeln wir berührungsempfindliche, hochaufgelöste und flexible Sensoren, die in Form einer taktilen Haut die komplette Roboteroberfläche bedecken und somit Kontakte zwischen Roboter und Mensch erfassen.
Des Weiteren forschen wir an inhärent sicheren Kinematiken, die z.B. nachgiebig und sehr leicht sind oder durch technologische Auslegung sicher-reduzierte Geschwindigkeiten ausführen können (mechatronische Umsetzung eines Elefantenrüssels).
Die Entwicklung neuer Sicherheitstechnologien und -komponenten zur Umsetzung flexibler und innovativer Mensch-Roboter-Kooperationsarbeitsplätze stellt einen unserer zentralen Forschungsschwerpunkte am Fraunhofer IFF dar.
Unsere Leistungen
- Konzeption und Entwicklung innovativer Sensortechnologien und Verfahren zur Umsetzung von schutzzaunlosen Mensch-Roboter-Kooperationsarbeitsplätzen
- Umfassende Kenntnisse und Erfahrungen auf dem Gebiet der optischen und berührungsempfindlichen Sensorsysteme (patentierte Technologien und Systeme)
- Umsetzung von Visualisierungssystemen zur Darstellung von sicherheits-, prozess- und roboterspezifischen Informationen
- Durchführung von Machbarkeitsuntersuchungen und Aufbau von Demonstratoren